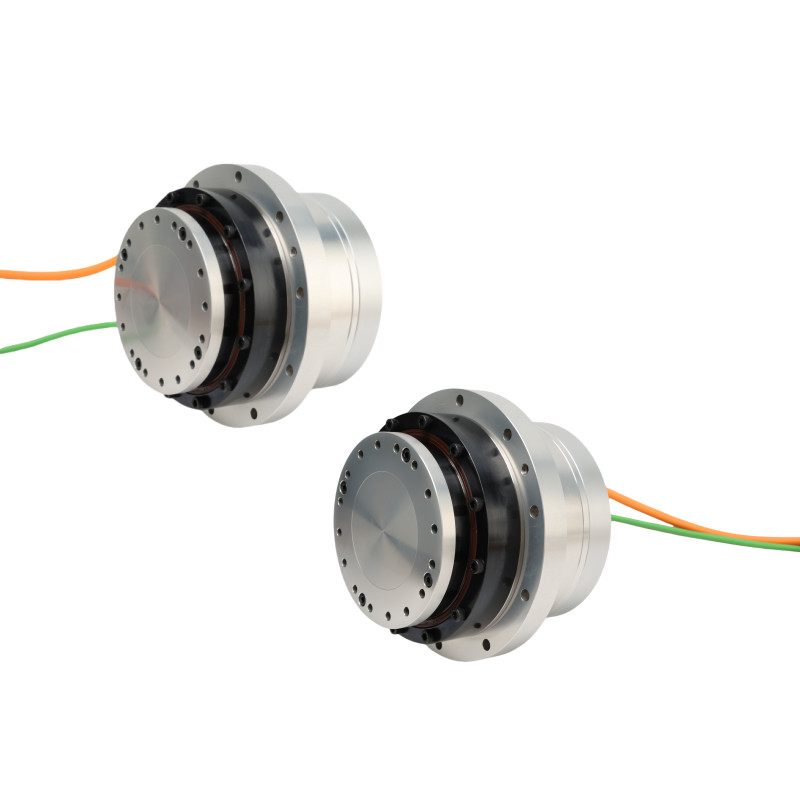
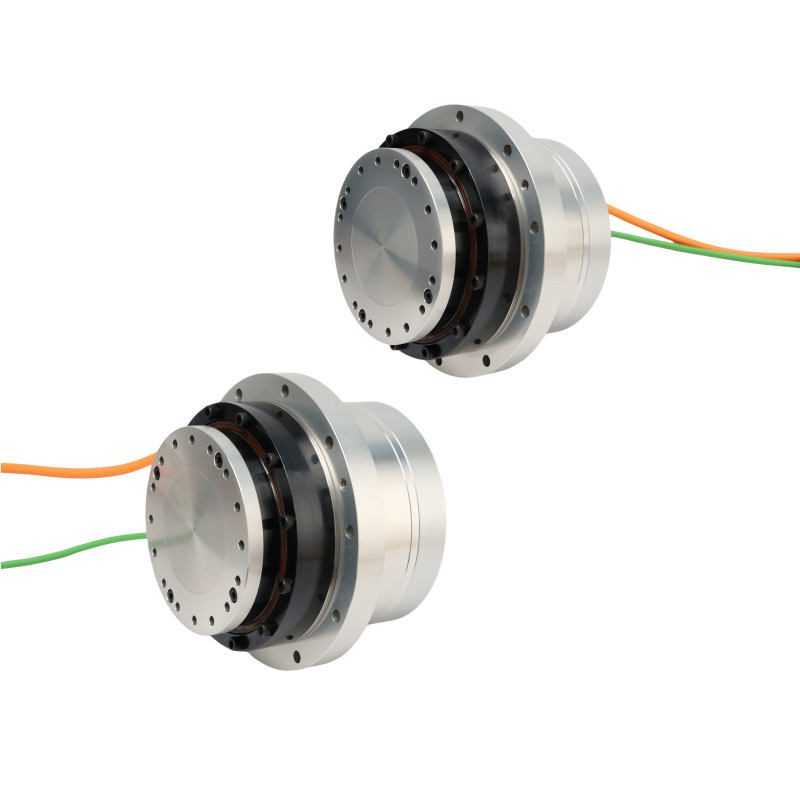
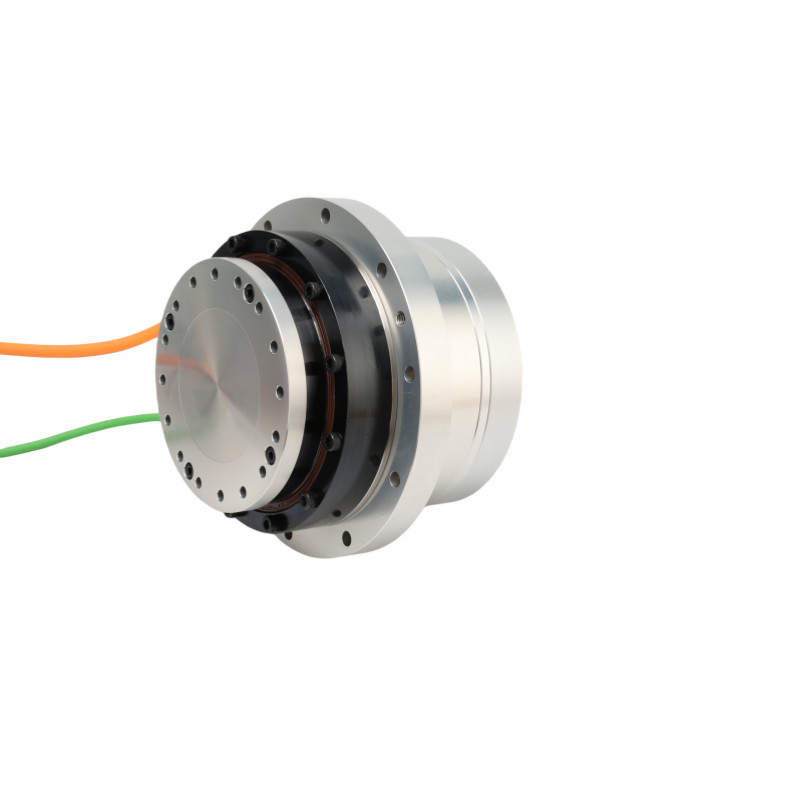
高トルク固形シャフト HASFシリーズモデル25 フレンジ式ローータリーアクチュエーター IP65 保護レベル
製品説明
ローータリーアクチュエータは,中心軸の周りに回転運動またはトルクを生成するように設計された機械装置である.それらは様々な産業,自動車,航空宇宙,制御回転運動が必要な他の用途.
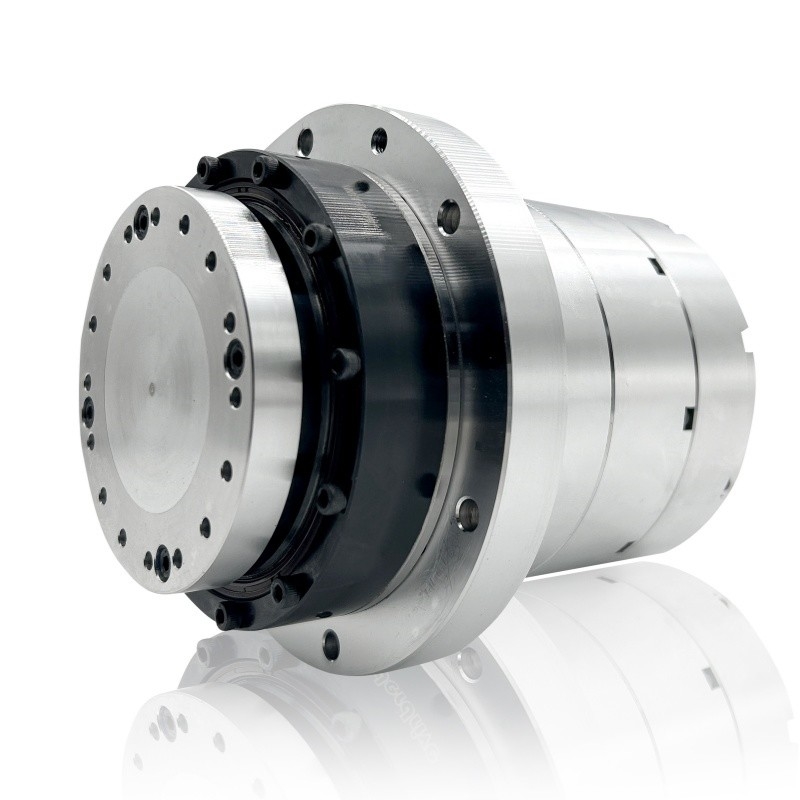
構成要素
1動作器体:通常は円筒形または箱状で,内部部品を収納する.
2ローティング・シャフト:出力メカニズムまたは負荷に接続され,ローティング・モーションを変換する.
3電力源:型によって,空気力 (圧縮空気),水力 (流体圧),電力 (電動モーター) または機械 (ギアリングおよびリンク) になります.
4制御メカニズム: 操作装置の操作を手動または自動化システムによって制御する.
申請
産業自動化
1ロボットアーム:ロータリーアクチュエーターは,組み立てライン,ピックアンドプレース操作,および他の自動化された作業に使用されるロボットアームおよび操作機の不可欠な部品です.
2輸送機と材料処理: 輸送機,分類機,および材料処理機器の回転運動を制御するアクチュエータ.
3梱包機械:アクチュエータは,密封,ラベル付け,詰め込みなどのタスクのために梱包機械の回転運動を容易にする.
娯楽
1テーマパークのライド:アクチュエーターは,アニメトロニックとライドメカニズムで使用され,ダイナミックな動きを作り,現実的な体験をシミュレートします.
2舞台およびイベント設備:回転動動装置は,舞台カーテン,照明装置,その他の劇場機器の移動を容易にする.
消費電子機器:
1消費電子機器:アクチュエータは,ズームレンズ,自動フォーカス,電子カメラなどのメカニズムのためにカメラ,スマートフォン,ゲームコンソールなどのさまざまな消費電子製品に使用されます.振動フィードバック.
エネルギーと公共事業:
1バルブアクチュエーション:ローટરીアクチュエーターは,流量,圧力,流体方向を調節するために,パイプライン,プロセス産業,およびユーティリティのバルブを制御します.
2再生可能エネルギー:アクチュエータは,太陽電池を太陽に向かって方向付け,最適なエネルギー収集のために太陽電池追跡システムで使用されます.
医療・医療:
1診断装置: ローータリーアクチュエータは,画像構成要素の正確な位置付けと移動のために,CTスキャナーやMRIマシンなどの医療機器で使用されます.
2外科ロボット:アクチュエータは,外科ロボットシステムにおける正確な動きと制御を可能にし,外科手術の精度と最小限の侵入を高めます.
仕様表
| シリーズ HAS |
20 |
| 減量比 |
51 |
81 |
101 |
121 |
161 |
| 220VAC |
ピークトルク |
N·m |
69 |
91 |
102 |
108 |
113 |
| 定数トルク |
N·m |
30 |
48 |
58 |
61 |
61 |
| 最大速度 |
rpm |
98 |
62 |
50 |
41 |
31 |
| 定速 |
rpm |
51 |
32 |
26 |
21 |
16 |
| 最大電流 |
武器 |
6.04 |
5.02 |
4.51 |
3.98 |
3.13 |
| 定数電流 |
武器 |
2.63 |
2.65 |
2.56 |
2.25 |
1.69 |
| トルク常数 |
Nm/アーム |
11.42 |
18.14 |
22.62 |
27.1 |
36.06 |
| 段階抵抗 |
オーム 20°C |
6.2 |
| 段階誘導性 |
mH |
7.7 |
| バックEMF |
Vrms/krpm |
25 |
| 48VDC |
ピークトルク |
N·m |
69 |
91 |
102 |
108 |
113 |
| 定数トルク |
N·m |
39 |
58 |
61 |
61 |
61 |
| 最大速度 |
rpm |
86 |
54 |
44 |
36 |
27 |
| 定速 |
rpm |
51 |
32 |
26 |
21 |
16 |
| 最大電流 |
武器 |
15.37 |
12.77 |
11.48 |
10.14 |
7.98 |
| 定数電流 |
武器 |
8.69 |
8.14 |
6.86 |
5.73 |
4.31 |
| トルク常数 |
Nm/アーム |
4.49 |
7.13 |
8.89 |
10.65 |
14.17 |
| 段階抵抗 |
オーム 20°C |
0.4 |
| 段階誘導性 |
mH |
0.9 |
| バックEMF |
Vrms/krpm |
7.7 |
| 絶対エンコーダー |
エコーダタイプ |
絶対エンコーダー |
| 解像度 (単回転) |
ほんの少し |
2324ビット |
| モーター マルチターンカウンタ |
ほんの少し |
16 |
| 一方向の位置精度 |
アークセック |
≤75 |
≤75 |
≤60 |
≤50 |
≤50 |
| 位置位置の精度の再現可能性 |
アークセック |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
| 転覆した硬さ |
x104N·m/rad |
24 |
| 扭曲硬さ |
x104N·m/rad |
1.8 |
2.3 |
| 慣性瞬間 |
ブレーキなし |
kg*m2 |
8.8*10^5 |
| ブレーキ付き |
kg*m2 |
9.17*10^5 |
| 質量 |
ブレーキなし |
キロ |
2.4 |
| ブレーキ付き |
キロ |
2.96 |
| モーターポール数 |
ポール |
16 |
| 環境条件 |
動作温度: 0~40°C
保存温度: -20~60°C
動作湿度/貯蔵湿度:RH 20~80% (凝縮なし)
振動抵抗: 24.5m/s2 (周波数: 10~400Hz)
粉や金属粉,腐食性ガス,燃やす気体,油霧,その他の室内使用は禁止
標高1000m以下 |
| モーター隔熱 |
隔熱抵抗: 100MΩ (DC500V) 以上 |
| 介電電強度 AC1500V/ 1分 |
| 隔熱クラス:F |
| 保護 の 程度 |
完全に閉ざされた自己冷却型 (IP65) |


 メッセージは20〜3,000文字にする必要があります。
メッセージは20〜3,000文字にする必要があります。